Your cart is currently empty!
Robotics Outline
Praegu on robotid kõikjal meie ümber, näiteks autod, olmeelektroonika, uuenduslikud mänguasjad ja sõjavägi. Praegu on robotid kõikjal meie ümber, näiteks autod, olmeelektroonika, uuenduslikud mänguasjad ja sõjavägi.
Maailma esimesed robotid ehitati eelmise sajandi 60. aastatel tootmises töötamiseks. Kõik 1961. aasta kevadel tööd alustanud General Motorsi autotehase robotit peetakse esimeseks robotiks nimega Unimate
Mõelge üsna lihtsale ja arusaadavale probleemile. Panime roboti suvalisele vabale kohale vabalt valitud koht. Tahame robotile õpetada järgmist käitumist: kui käivitad roboti, siis see läheb otse edasi, kuni jõuate seinani. Enne kui robot täiskiirusel vastu seina põrkab, peab ta aru saama et ees on takistus, ja peatu. Mida me sellise ülesande täitmiseks vajame?
1) Roboti liikuma panemiseks peavad sellel olema mootorid, mis liigutavad tema rattaid. Hästi inimesele suunatud olukorras on mootoritel käivitamiseks nupp. Me tahame selliseid mootoreid saab käivitada elektrilise signaaliga.
2) Takistuse olemasolust arusaamiseks on vaja mingit seadet, mis robotile infot edastaks keskkonnast. Kõiki selliseid seadmeid nimetatakse anduriteks. Andureid on sadu teine. Mõned suudavad mõõta helitugevust ruumis – neid nimetatakse helianduriteks. muud mõõta kaugust ultraheli või valguse abil – neid nimetatakse kaugusanduriteks. Sööma andurid, millega saab mõõta magnetvälja tugevust, CO2 sisaldust õhus ja kümneid ja kümneid teisi erinevad füüsikalised suurused. Tehnilisest vaatenurgast jagatakse andurid kahte suurde klassi: analoogandurid ja digitaalsed andurid.
3) Mootorite käivitamise ja seiskamise käsud peavad tulema kuskilt, kui andurilt tuleb signaal, et sein on lähedal. Ja kuidagi peab see ka kontrollima, kui tihti andur infot salvestab jagada ja andurilt saadud tulemuse põhjal otsustada, kas lõpetada juba või mitte. Kõik see süsteemi jaoks peab olema juhtseade e. “aju”. Robotsüsteemides nimetatakse neid “ajudeks”. kontrolleritena. püüame igal pool kasutada terminit “kontroller”.
4) Kontroller on seade, mille saab salvestada ja seal käivitada, et täita robotile etteantud ülesannet. soovitud programm. Programm tuleb kompileerida tavalises arvutis, laadida robotisse (või kasutades juhtmega või juhtmevaba raadioühendust), käivitab ja juhib roboti käitumist, annab annab käsklusi mootorite käivitamiseks ja seiskamiseks, võrdleb andurilt saadud andmeid, vajadusel annab inimestele suunatud teave on ka roboti ekraanil.
Elektriahi/Электрическая цепь
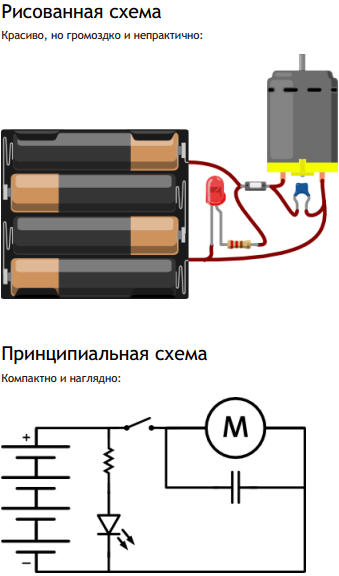
Рисованная и принципиальная схема
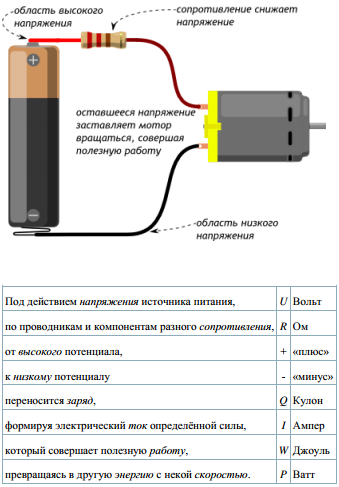
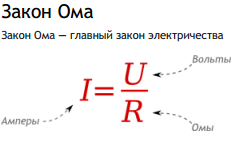
Закон Ома
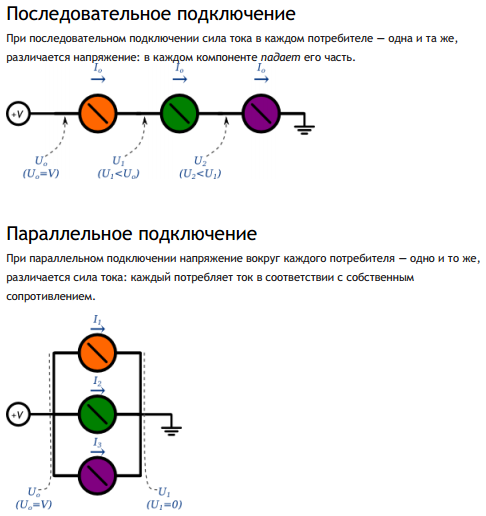
Параллельное и последовательное соединение
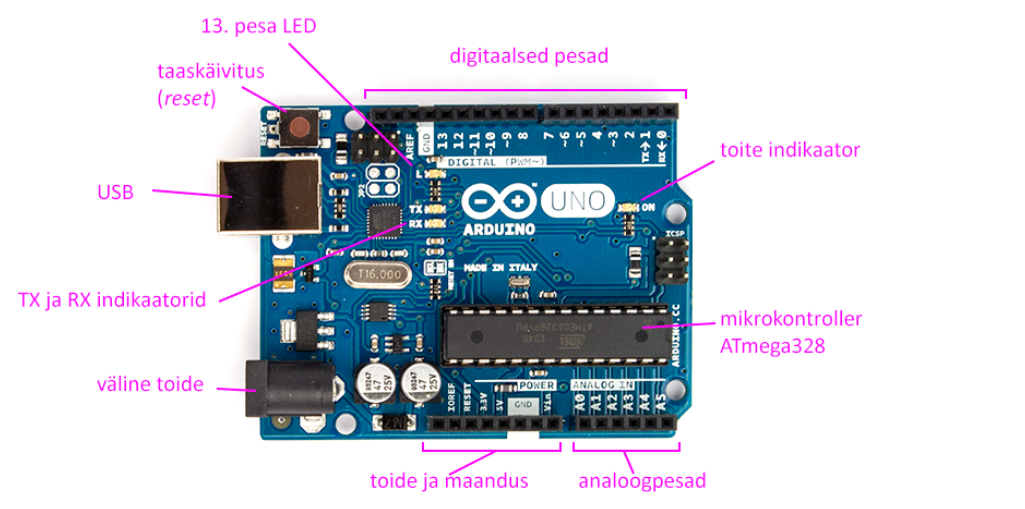
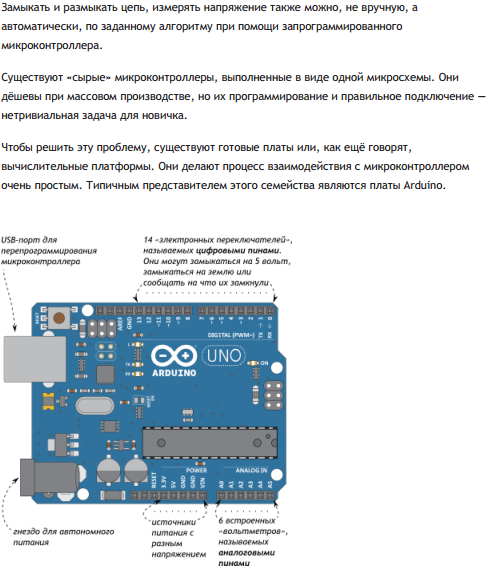
Микроконтроллер
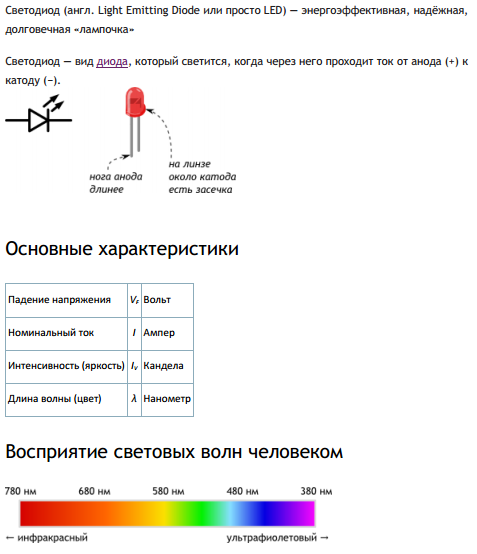
светодиод
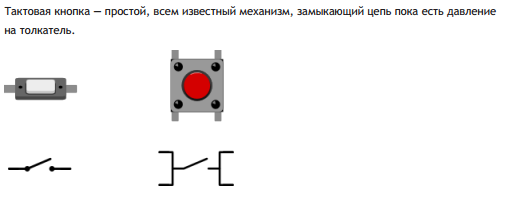
кнопка